Humanoid Robot
We conduct a research on biped locomotion, aiming to develop a humanoid robot. Our research activity focuses notably on a comparative analysis of two different structures, namely a serial-linked biped robot and a parallel-linked biped robot. Also, we recently launched a research activity on a hopping robot as well.
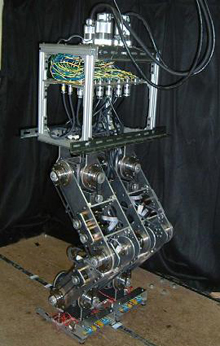
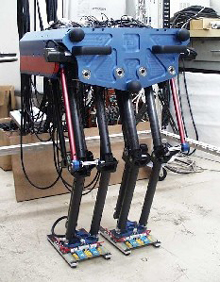
Serial Link Parallel Link
The parallel-linked biped robot, in which motors are concentrated in a waist part of the robot, achieves lighter legs. Light legs ensure low energy consumption and better safety towards environment in case of collision.
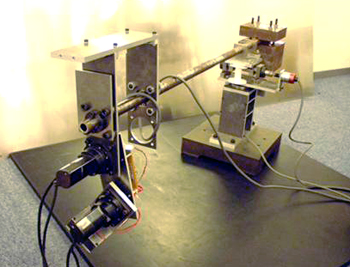
Hopping Robot
Another unique biped robot is a hopping robot. The hopping action, which is adopted by many insects and animals for their movement, enables a robot swifter movement, which is desired notably in case of emergent avoidance of collision.
 —
—
 —
—