Bilateral Robot
Teleoperation robots are rapidly becoming to be next everyday alternatives for human workers under dangerous environment. Our primary research target is to develop new control laws for teleoperation, which feedback vivid sensation of environment to an operator.
Multi Degree of Freedom Robot
We recently launched the development of a surgical robot. In this project, we have successfully established the control law, which can reproduce the touch of environment in the operator side vividly. We also conducted an experiment using a couple of teleoperation robots over Internet with our partner institution in Europe.

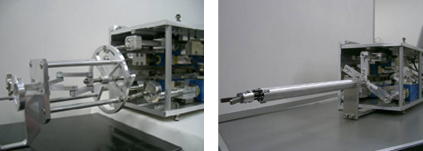
Bilateral XY Table
We apply our control method, which was initially developed mainly for the use of a surgical robot, to other teleoperation robots as well. For instance, the XY bilateral table pictured above allows an operator to feel “rubbing” and “cutting” actions.
Combining various teleoperation robots mentioned above, we are eagerly conducting our research activity to achieve our aim, the development of a novel surgical robot system.
MDOF Forceps Robot (56MB)
Tele-Hand(2.23MB)
Thrust Wire (1.35MB)
 —
—
 —
—